Fuchssteuerung M13
Für eine in Dänemark (OZ) veranstaltete Fuchsjagd wurde ein 160m Fuchs mit zugehöriger Steuerung benötigt. Da uns nur Sender für 80m und 2m zur Verfügungs standen, haben wir selbst ein Gerät gebaut. Die dafür entwickelte Steuerung wird hier beschrieben. Sie ist universell einsetzbar und (vielleicht abgesehen von der Programmierung des verwendeten PIC-Prozessors), einfach aufzubauen. Wir stellen hier das Schaltbild, das Layout und natürlich die Beschreibung und das PIC-Programm zur Verfügung.

Allgemeine Beschreibung
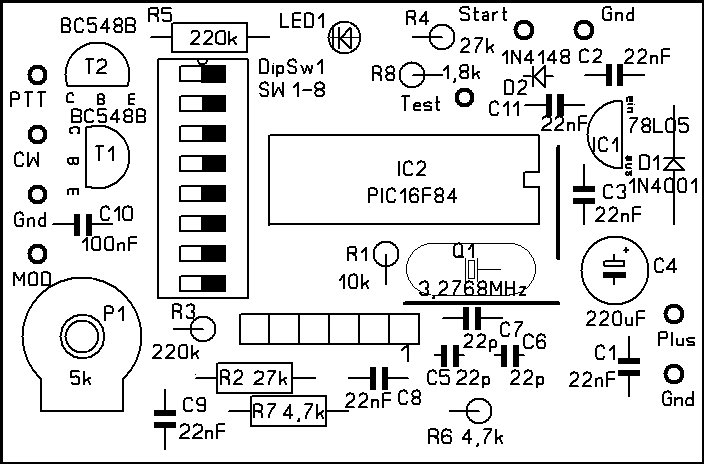
Die Schaltung der Fuchssteuerung ist Dank Einsatzes des sehr gebräuchlichen Single Chip Prozessors PIC16F84 relativ übersichtlich und lässt sich durchaus auf einer Lochrasterplatine aufbauen. Einfacher ist natürlich die Verwendung der von mir entwickelten kleinen Platine, da die Gefahr der falschen Verdrahtung hier entfällt. In der Stückliste sind die Bestellnummern der Fa. Reichelt angegeben. Aufgrund des einseitigen Layouts sind zwei Drahtbrücken erforderlich. Bei Verwendung einer Lochrasterplatine empfehle ich, sich etwa an den Bestückungsplan der von mir entwickelten Platine zu halten. Die einzelnen Verbindungen von Lötpunkt zu Lötpunkt stellt man mit Fädeldraht, bzw. Kupfer-Lack-Draht von etwa 0,2 mm Durchmesser her. Ich verwende dafür allerdings immer feine, farbig isolierte Litzen, die im Handel nicht leicht zu beschaffen sind. Mein Tipp: Man schneidet alte Druckerkabel, RS-232-Kabel, Telefonanschluß- schnüre oder Ähnliches auf und gewinnt so die erforderlichen dünnen Litzen mit Isolation kostenlos. Den verschiedenen Signalen ordne ich dann immer eindeutige Litzenfarben zu.
Für den Prozessor sollte man eine IC-Fassung verwenden, dann lässt sich der fertig programmierte PIC einfach einsetzen bzw. bei Bedarf leicht austauschen. Die Bestückung beginnt man am besten mit den beiden Drahtbrücken, dann folgen der DIP-Schalter, die IC-Fassung und die Lötstifte. Die Lötstifte erfordern eventuell etwas Kraftaufwand, um sie in die Bohrlöcher zu drücken, das ist aber auch gut so, damit sie sicheren Halt bieten und bei Anlöten der Anschlussdrähte nicht wackeln oder herausfallen. Einige Widerstände sind stehend, andere liegend zu montieren, bitte jeweils vorher schauen was vorgesehen ist und dann die Anschlussdrähte entsprechend zurecht biegen. Bei dem Spannungsregler und den Transistoren ergibt sich die richtige Polung aus dem Bestückungsplan. Ansonsten ist nur bei der Leuchtdiode, den beiden Dioden und dem Elektrolytkondensator auf die richtige Einbaulage zu achten. Die 6-polige Stiftleiste wird nur zur „In Circuit-Programmierung“ benötigt und kann entfallen, wenn der PIC16F84 im Sockel montiert wird und ein fertig programmierter Prozessor verwendet wird.
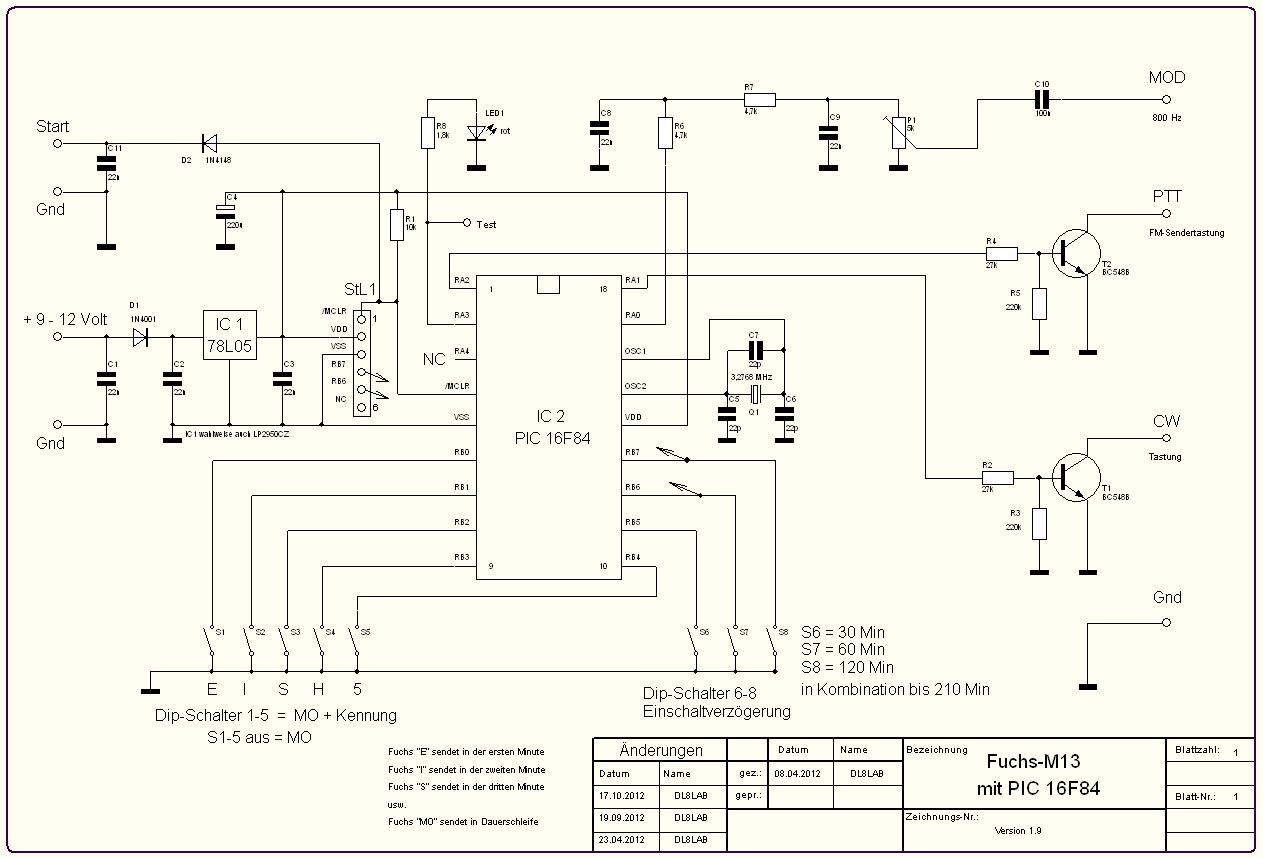
Nachdem alle Bauteile entsprechend des Bestückungsplanes eingelötet sind, werden als Erstes die Lötstellen noch einmal nach ungewollten Brücken oder schlechter Lötung untersucht. Dann kann mit der Funktionsprüfung begonnen werden. Dazu sollten für den ersten Test alle DIP-Schalter auf „Aus“ stehen. Wenn jetzt die Betriebsspannung angelegt wird, ist es sinnvoll die Stromaufnahme im Auge zu behalten. Sollten mehr als 5mA fließen, ist Vorsicht geboten. Wenn die LED im Rhythmus der Morsezeichen leuchtet, ist die grundsätzliche Funktion schon nachgewiesen. Jetzt müssen die Schaltausgänge „PTT“ und „CW“ und der Modulationsausgang „MOD“ geprüft werden. Für die beiden Open-Collector –Ausgänge zur Sendertastung „PTT und CW“ empfehle ich eine Leuchtdiode mit Vorwiderstand, eine Schwachstromlampe oder ein kleines Kammrelais zu verwenden. Dazu wird z.B. ein Relais einfach zwischen +12 Volt und Schaltausgang gelegt. Dabei ist es wichtig die Transistoren nicht zu überlasten. Jeder Transistor ist in der Lage etwa 200mA zu schalten. Beim PTT-Ausgang muss das Relais während der Morsezeichenausgabe permanent angezogen sein. Am CW-Ausgang soll es im Gleichtakt mit dem Leuchten der Kontroll-LED anziehen und abfallen. Die Prüfung ist recht einfach und eindeutig. Falls das nicht funktioniert, ist der Spannungspegel an den entsprechenden Ausgängen (Pin 1 = PTT u. Pin 18 CW) des PIC zu messen. Diese Ausgänge sind „aktiv high“. Sind diese beiden Prüfungen erfolgreich verlaufen, kann man mit einem kleinen NF-Verstärker oder alternativ mit einem Minikopf- oder Ohrhörer den Ton am Ausgang „MOD“ abhören. Wer ein Oszilloskop besitzt, kann hier Morsezeichen von 800 Hz und max. 1Vss (ohne Belastung) feststellen. Der Ton ist natürlich nur hörbar, wenn gerade ein Morsezeichen ausgegeben wird. Rechtsanschlag von P1 ergibt den lautesten Ton, bei Linksanschlag darf nichts zu hören sein.
Nachdem auch diese Prüfung erfolgreich war, bleibt nur noch die verschiedenen Kennungen und die Verzögerungszeiten zu prüfen. Hier sind keine Fehler zu erwarten, wenn die Lötstellen am DI-Schalter und den entsprechenden Pins des Prozessors ok sind. Andererseits ist das gerade der interessante Teil der Inbetriebnahme, der etwas langwierig ist, aber durchaus Spaß macht.
Die erforderliche Einstellung der DIP-Switches ist der Anlage „Beschreibung Fuchssteuerung M13 “ entnehmen.
Viel Spaß
Claus (DL8LAB)

Bestückungsplan_Fuchs_M13